DRI Explained: Thermal Infrared Camera Ratings
Infiniti WhitepaperIf you’ve done any research comparing thermal cameras, you’re likely to have come across the term “DRI”, which is often used to compare performance between thermal imaging cameras. DRI stands for Detection, Recognition and Identification, however it’s important to understand how those terms are defined, as they’re likely to mislead many customers with unrealistic expectations.
Note: As for more common color surveillance cameras (visible/NIR), there is another standard that sounds similar to DRI, but is different in its definitions. This standard is called DORI, which stands for Detection, Observation, Recognition and Identification. While most of the terms share the same words as DRI, it’s important to recognize that their specifications are quite different.
An outdated specification
So the terms detection, recognition, and identification can be misleading, especially to end users who do not have a military or electro-optics background. To make matters worse, the original 1950s specifications were based on old sensors and screen display technologies. The increasing resolution of thermal sensors has shrunk the size of the DRI areas to tiny specks of white on the screen.
For example, our standard uncooled thermal sensors have a resolution of 640×480, which is over 300,000 pixels. Human “detection” only requires the target to be visible on 3–4 of those pixels. This is an extraordinarily small portion of the screen that can easily go unnoticed by the human eye. In fact, if this page were the size of your video feed, the area required for a human detection rating would be equivalent to the size of this rectangle:
This area becomes even smaller when you consider our HD sensors, which have resolutions over four times larger at 1280×1024 (over 1.3 million pixels).
Even when magnified, the amount of detail visible at the DRI distances is not as high as one might expect, as seen in the chart below.
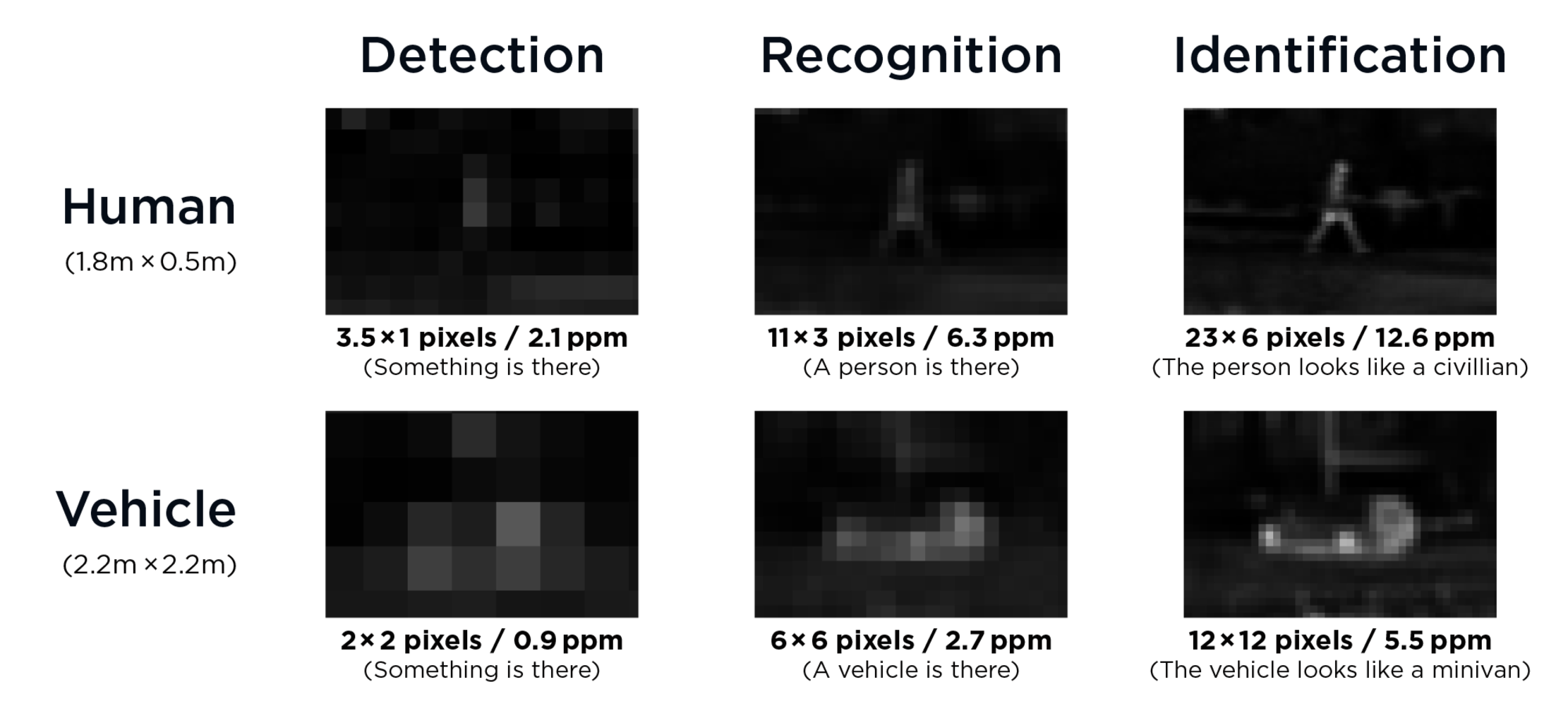
Note that while it may seem impossible to tell that a human or vehicle is present in some of these images, it’s often the movement of pixels in an area that makes it more obvious that an object is present. In addition, these standards were developed with trained professionals in mind, who will be able to spot activity much easier than a civilian.